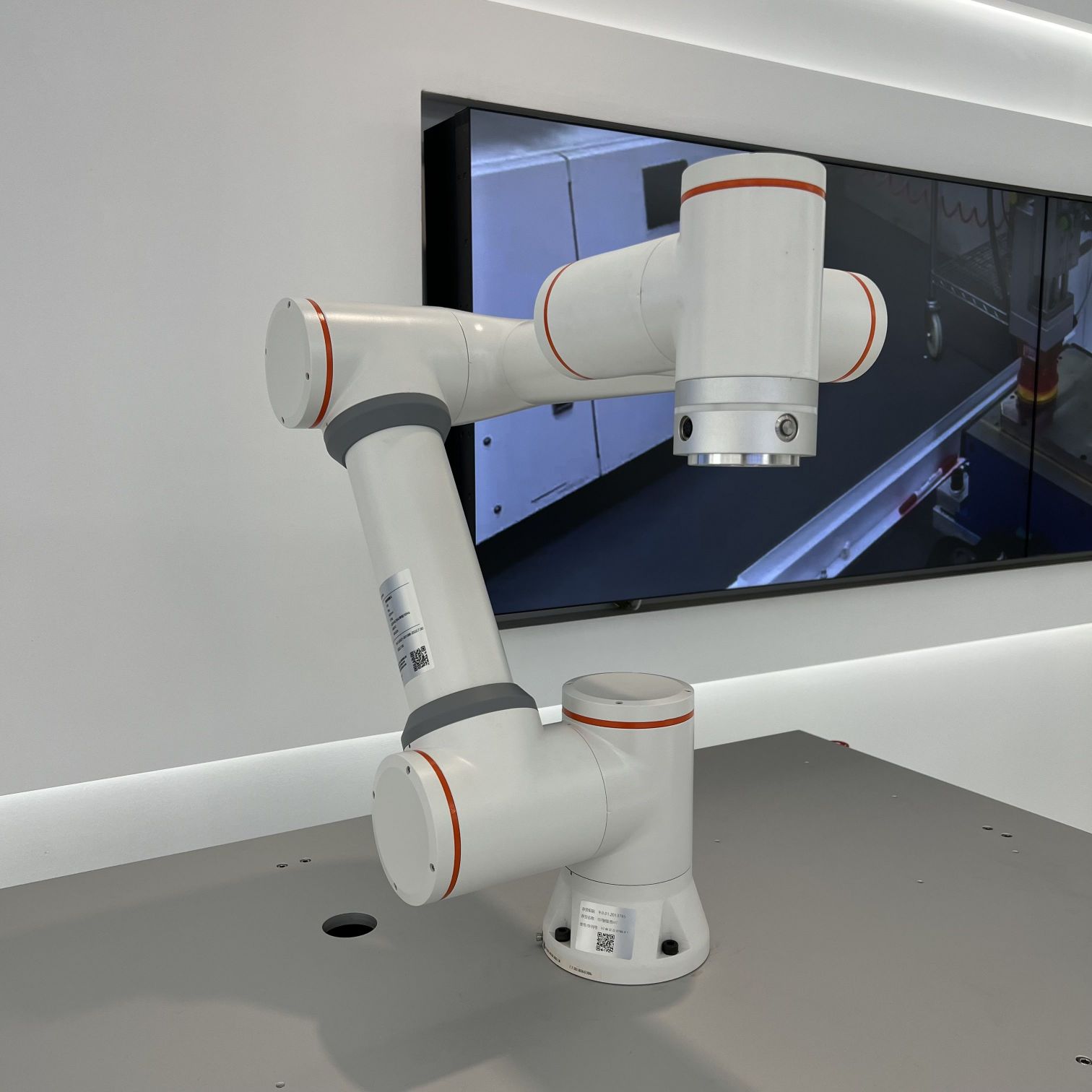
FR 系列协作机器人
协作机器人将延伸您的时间和空间,解放繁杂的低效重复,让您的双手和大脑拥抱更广袤的天际。未来,您将见证协作机器人与众协同。
它的出现,不仅提高了人机协作的效率,也加快了更多企业的自动化进程,并为制造商释放了占地面积、降低了实施机器人的成本。
它的出现,不仅提高了人机协作的效率,也加快了更多企业的自动化进程,并为制造商释放了占地面积、降低了实施机器人的成本。

 |










COBOT
HEAVTH
功能
核心零部件自产自研,搭配专利设计方案,重复定位精度±0.02mm,采用模块化设计,确保稳定性
采用图形化编程,零力示教,丝滑拖拽,多轴联动一卡集成
IP66防护等级认证,完美适用于各类应用环境
产品参数
1)整机保修一年,焊枪、焊枪耗材、焊枪清洗站耗材不包含在保修范围内。 (具体条款见设备合同或咨询销售工程师)。
2)保修期内,设备因自身质量问题,免费维修或更换,凡因操作不当或未按说明操作而造成的人为故障或损坏,均予以赔偿。
3)保修期满后,对产品提供终身维护服务

















