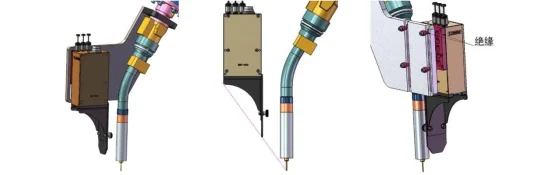
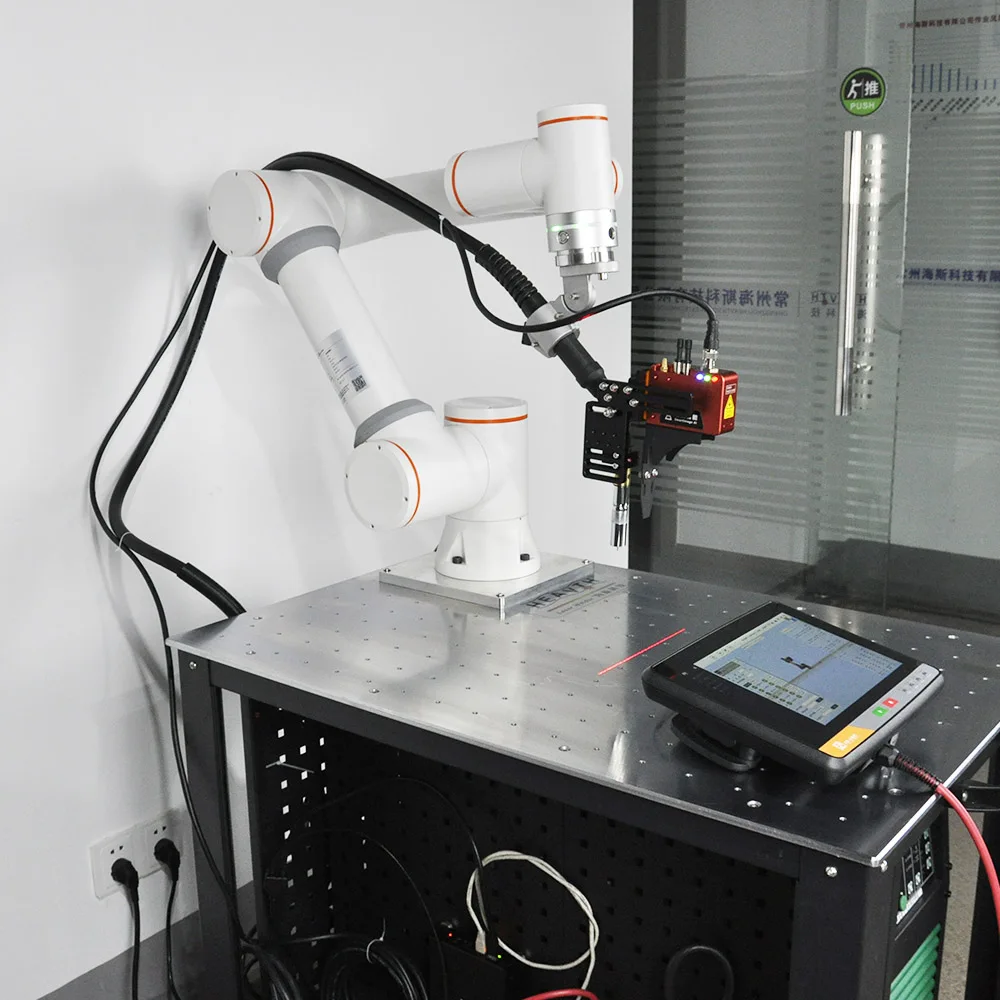
协作机器人 MIG 焊接套件
6 六台协作机器人 MIG 焊接 会延伸你的时间和空间,解放复杂低效的重复,让你拥抱更广阔的视野。未来,你会看到FAIR EVERYWHERE。
它的出现,不仅提高了人机协作的效率,也加快了更多企业的自动化进程,并为制造商释放了占地面积、降低了实施机器人的成本。
它的出现,不仅提高了人机协作的效率,也加快了更多企业的自动化进程,并为制造商释放了占地面积、降低了实施机器人的成本。
CR5-MIG350
Heavth





| 模型 | FR3/FR5 | FR10 | ||
| 移动 | 范围 | 最大限度。速度 | 范围 | 最大限度。速度 |
| J1 | ±175° | 163°/秒 | ±175° | 163°/秒 |
| J2 | -95°/+70° | 148°/秒 | -95°/+70° | 148°/秒 |
| J3 | -85°/+75° | 223°/秒 | -85°/+75° | 223°/秒 |
| J4 | ±180° | 250°/秒 | ±180° | 250°/秒 |
| J5 | ±115° | 270°/秒 | ±115° | 270°/秒 |
| J6 | ±360° | 337°/秒 | ±360° | 337°/秒 |
| 模型 | FR3 | FR5 | FR10 |
| 有效载荷 | 3公斤 | 5公斤 | 10公斤 |
| 抵达 | 622毫米 | 922毫米 | 1400毫米 |
| 范围 | 6 | 6 | 6 |
| 人机界面 | 10.1寸示教器或移动端APP | ||
| 重复性 | ±0.02mm | ±0.02mm | ±0.05毫米 |
| 典型 TCP 速度 | 1米/秒 | 1米/秒 | 1.5米/秒 |
| 知识产权分类 | IP54(可选IP66) | ||
| 噪音 | <65分贝 | ||
| 机器人安装 | 任意方向 | ||
| 输入/输出 | 数字输入(DI)2, 数字输出(DI)2, 模拟输入(AI)1, 模拟输出(AO)1 | ||
| 电源 | 24V/1.5A | ||
| 沟通 | I/O、TCP/IP、Modbus_TCP/RTU、Profinet | ||
| 开发环境 | C#/C++/Python/Java/ROS | ||
| 脚印 | 130毫米 | 150毫米 | 190毫米 |
| 重量 | 约15KGS | 约22KGS | 约40KGS |
| 工作温度 | 0-45℃ | ||
| 工作湿度 | 90%RH(非凝结) | ||
| 机器材质 | 铝、钢 | ||
| 模型 | 米格350R | 米格500R |
| 电压(伏) | 三相AC380V±10% | 相AC380V±10% |
| 电源频率(HZ) | 50赫兹 | 50赫兹 |
| 额定最大输入电流(A) | 21.5 | 44.6 |
| 空载电压(V) | 62 | 70 |
| 输出电流(A) | 40-350 | 40-500 |
| 输出电压调整率(V) | 16-29日 | 16-39 |
| 工作周期 | 60% | 60% |
| 线径(mm) | 0.8/1.0/1.2 | 0.8/1.0/1.2/1.6 |
| 绝缘等级 | F | F |
| 外壳等级 | IP21S | IP21S |
| 重量(KG) | 33.5 | 42.6 |
| 尺寸(毫米) | 550*310*600 | 550*310*600 |